Automotive autonomy technology is changing economies and global industries — and is also a driving force behind military modernization. Bringing these self-driving vehicles to life on- and off-road requires new concepts and algorithms to be tested expeditiously and cost-effectively — all of which happen through virtual prototyping.
Assistant Professor, Dr. Laura Redmond is heading up a team of faculty and students from Civil Engineering to contribute to Clemson’s new Virtual Prototyping of Autonomy-Enabled Ground Systems (VIPR-GS) center. Redmond along with multi-departmental faculty are recipients of an $18 million grant centered at CU- ICAR. Redmond’s team will focus verification and validation (V&V) methods and tools that can be applied in the planning, prototyping and active-duty phases of autonomy-enabled ground vehicles. Ultimately, the proposed methods and tools will have the benefit of improving vehicle safety and performance, as well as increasing the amount of quantitative data available for test planning and risk management.
Researchers will build and validate various virtual models and simulations for off-road vehicles with advanced electrified propulsion, situational intelligence, AI-enabled autonomy and team-routing algorithms. The Center will support one of the Army Big Six Modernization Priorities – developing next-generation combat vehicles by providing tools for technology roadmaps and hardware demonstrations.
“The VIPR Center will be an essential part of a Ground Vehicle Modeling and Simulation Alliance that GVSC will rely on as it leads the U.S. Army in the integration of new capabilities into military ground vehicles,” said David Gorsich, US GVSC Chief Scientist.
The Center will leverage a systems engineering approach to propel research breakthroughs in off-road vehicle autonomy and vehicle propulsion. Dr. Redmond’s research activities will take place on Clemson’s main campus and will include learning opportunities for students at all levels.
The technical approach can be divided into several research tasks that span across the life cycle of an autonomy-enabled ground vehicle as shown in Figure 1. Starting in the planning phase, the team has outlined an approach for verification of autonomy software utilizing formal verification methods, of which there is limited research to date. The next task spanning the planning and prototyping phases is surrogate-enabled V&V which aims to leveraging surrogate modeling techniques that will ultimately help inform resource-efficient test planning tools. The third task within the prototyping phase is accessible model validation methods for lean datasets. The proposed validation tool leverages Bayesian methods to provide quantitative data regarding model validation and better inform the decisions made based on vehicle model outputs. The final task within the active-duty phase is creation and application of a digital twin to enable exploration of design and operating issues throughout the product lifecycle.
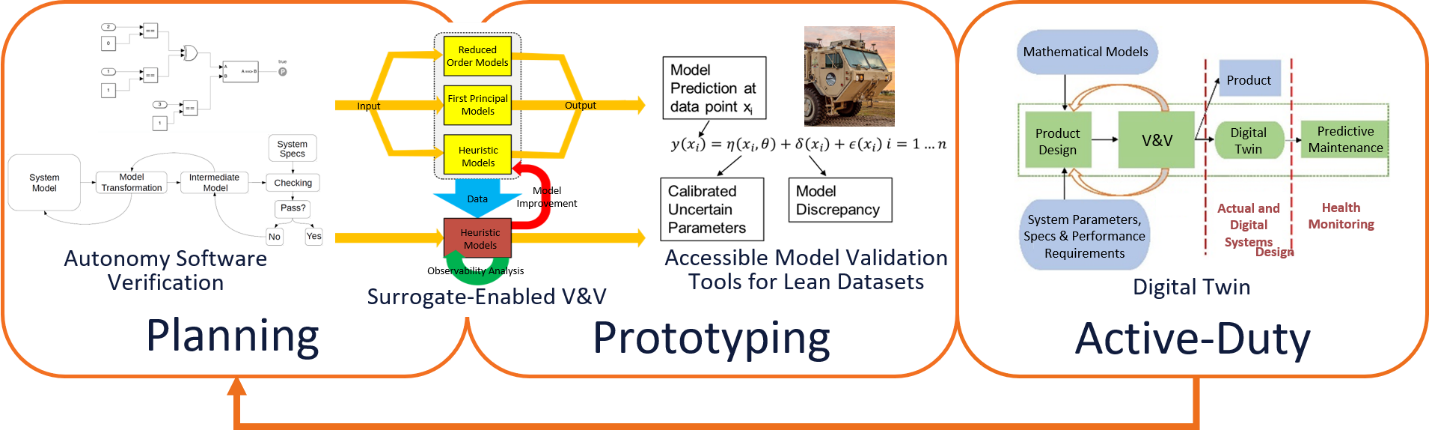
Figure 1
Redmond’s areas of expertise span advanced simulations for civil, mechanical and aerospace applications, model calibration, model verification and model validation by test. Examples of current research applications include test-validated finite element (FE) simulations for drive-by-health monitoring of bridges, modeling and design of rigid-flex PCB robotics for extreme impact resistance, Bayesian calibration and validation techniques and design of metamaterials. Research sponsors include NASA, NSF, Army GVSC and industry partners.
Excerpts from $18M in government funding supports new Virtual Prototyping of Ground Systems Center
College of Engineering, Computing and Applied Sciences; External Affairs; Research
